
Building a robot that could pick up delicate objects like eggs or blueberries without crushing them took lots of control algorithms that process feeds from advanced vision systems or sensors that emulate the human sense of touch. The other way was to take a plunge into the realm of soft robotics, which usually means a robot with limited strength and durability.
Now, a team of researchers at Harvard University published a study where they used a simple hydraulic gripper with no sensors and no control systems at all. All they needed was silicon oil and lots of tiny rubber balls. In the process, they’ve developed a metafluid with a programmable response to pressure.
Swimming rubber spheres
“I did my PhD in France on making a spherical shell swim. To make it swim, we were making it collapse. It moved like a [inverted] jellyfish,” says Adel Djellouli, a researcher at Bertoldi Group, Harvard University, and the lead author of the study. “I told my boss, ‘hey, what if I put this sphere in a syringe and increase the pressure?’ He said it was not an interesting idea and that this wouldn’t do anything,” Djellouli claims. But a few years and a couple of rejections later, Djellouli met Benjamin Gorissen, a professor of mechanical engineering at the University of Leuven, Belgium, who shared his interests. “I could do the experiments, he could do the simulations, so we thought we could propose something together,” Djellouli says. Thus, Djellouli’s rubber sphere finally got into the syringe. And results were quite unexpected.
The sphere has a radius of 10 mm, and its 2-mm-thick silicone rubber walls surround a pocket of air. It was placed in a container with 300 ml of water. When the pressure in the container started to increase, the sphere, at 120 kPa, started to buckle. Once it started to buckle, pressure remained relatively steady for a while, even though the volume occupied by the fluid continued dropping. The liquid with a sphere in it did not behave like water anymore—it had a pronounced plateau in its pressure/volume curve. “Metafluids—liquids with tunable properties that do not exist in nature—were theorized by Federico Capasso and colleagues, who wanted to achieve a liquid with negative refractive index. They started with optics back then, but looking at the behavior of water with this rubber sphere in it, we knew what we had was a metafluid,” says Djellouli.
Mixing programmable fluids
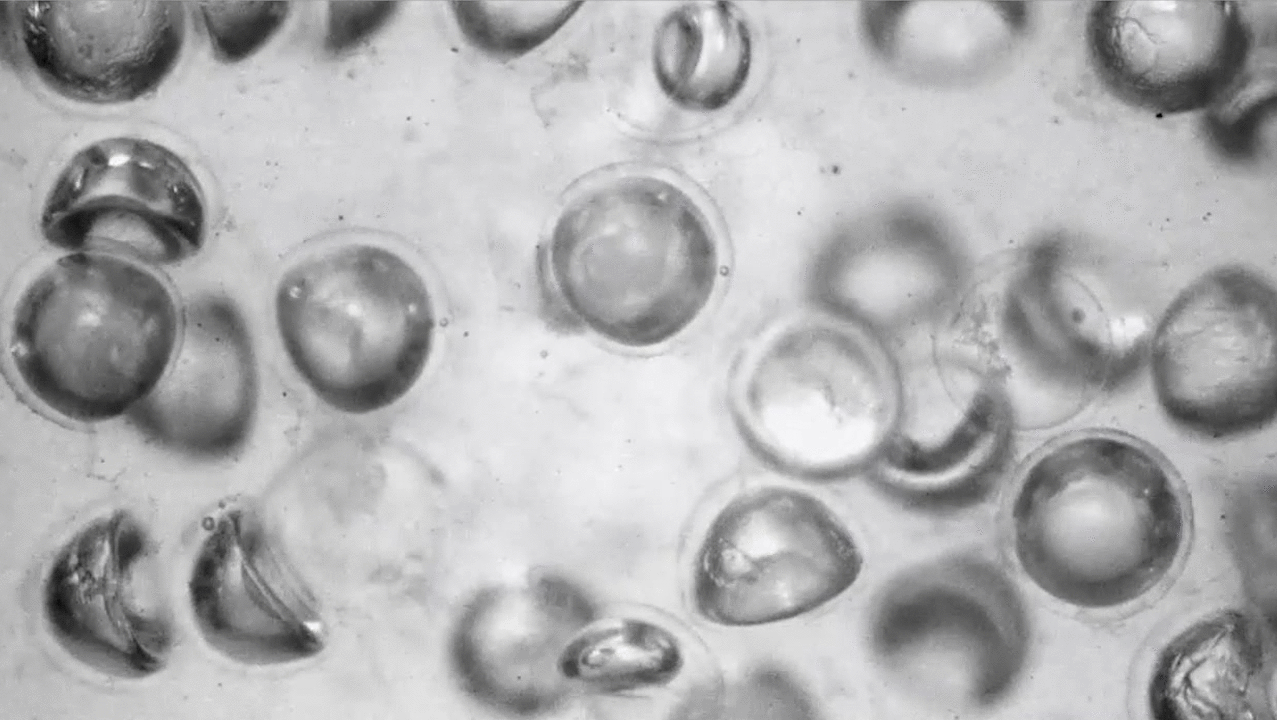
Putting a single rubber sphere in the water was just a starting point. “I always had this idea in the back of my head: Like, what would happen if I put in a lot of them?” Djellouli told Ars. So, his team started to experiment with different sizes and numbers of the spheres in the medium and using different mediums like silicon oil. “You can tune pressure at which the spheres activate by changing their radius and thickness of their walls. When you make the spheres thicker, you need more energy to make them buckle and thus the activation pressure will be higher,” explains Djellouli.
There are other parameters that can be changed to program desired properties in the metafluid. These include the volume fraction—basically how much of the total fluid’s volume is taken by the spheres—and the structure of the spheres, as the fluid behaves differently when you put spheres with different sizes and thickness in it. You can also tune this by using mixtures of spheres with different properties. “If the variation in size and thickness of the spheres is very tight, you are going to have a very flat plateau of pressure when they activate. If you have a wider distribution, the transition from all unbuckled to all buckled will be smoother,” says Djellouli. Using different mixtures of spheres also enables multiple plateaus at different pressures in one fluid. “This way you can precisely tune the pressure/volume curve,” Djellouli adds.
By tuning those curves, his team managed to build a smart hydraulic gripper that works without the need for sensors or control systems.


{kind=link}